
Definição:Um
robô consiste num equipamento eletro-mecânico destinado a realizar
tarefas repetitivas ou então substituindo de alguma forma o ser
humano em uma aplicação específica. Durante anos os
robôs foram evoluindo e assumindo tarefas antes inimagináveis.
A palavra robô tem origem na palavra tcheca robota que quer dizer
trabalho escravo.
A necessidade de usar robôs
veio com o aumento da população no planeta e consequentemente
o aumento da produção de bens de consumo, fazendo com que
a necessidade de uma produção mais veloz e com qualidade
fosse exigida.
Ao dizer a palavra robô, a idéia
que surge é de um amontoado de latas com forma humana com cabeça,
braços, tórax e pernas. Mas esse conceito é errado
quando analisamos mais profundamente o conceito e encontramos robôs
nas mais diversas formas:desde carros insetos até animais domésticos.

Classificação
dos robôs:
Classificação dos robôs: podemos
classificar os robôs nos seguintes tipos básicos:
Robôs industriais: São os que realizam
na indústria trabalhos dedicados à manipulação
de peças ou ferramentas. Por exemplo podemos citar os robôs
que fazem soldagem de ponto na indústria automobilística.
Robôs médicos: Dá-se esse
nome às próteses de braço ou perna, com motorização
própria, que tenham capacidade de funcionamento autônomo,
com ações reflexas. Como exemplo podemos citar as pernas
mecânicas substituindo as pernas perdidas em um acidente.
Robôs móveis: São máquinas
com capacidade de se locomover no solo desviando de obstáculos com
ou sem a intervenção do homem. Como exemplo temos o BaseI
ou as sondas espaciais que andam explorando o solo de planetas vizinhos.
Outros tipos:existem outro tipos mais específicos
a serem analisados caso a caso.
Tipos de robôs quanto ao controle:
1-Manipulador manual: É todo engenho mecânico de manejo de peças ou ferramentas que requeira a intervenção manual do homem para sua operação, ou seja, o homem guia manualmente a máquina servindo essa como uma multiplicadora de forças.
2-Robô sequêncial: É aquele que realiza um trajeto sequêncial podendo ser uma sequencia fixa setada pelo fabricante inacessível para o usuário, ou de sequência variável onde a sequência é alterada conforme as necessidades do usuário.
3-Robô de aprendizagem: Nesse tipo de robô, o trajeto/sequência é programado guiando-o manualmente pelo caminho que deve seguir.
4-Robô de controle numérico: Nesse caso, temos através de uma sequência de comandos a trajetória/sequência de ações que o mesmo deverá executar. Os comandos ficam armazenados em arquivos.
5-Robô "inteligente" : É aquele que
muda as condições de trabalho mediante estímulos externos
provenientes de sensores óticos, magnéticos, sonoros, etc.
Órgãos motores:
Os meios de locomoção do robô podem
ser:
Acionadores pneumáticos: nesse tipo de
acionamento temos um controle muito impreciso, sendo aplicados geralmente
em garras ou aprensores por permitirem somente duas posições:
aberta e fechada.
Acionadores hidráulicos: São os cilindros que desenvolvem movimentos retos apresentando uma boa relação peso/potência. Portanto apresentam alguns incovenientes como:
Programação:
Geralmente os robôs são controlados por
computadores industriais PC, mas alguns possuem seu próprio sistema
de controle e linguagem de programação. Dentre várias
linguagens podemos citar algumas que eram usadas alguns anos atrás:
AL - Linguagem baseada em pascal
VAL - Obtida do AL mas utiliza o basic
RPL - Criada pela SRI international para controle de
pequenos robôs
RAIL - Desenvolvida pela Automatix para o controle de
robôs e sistema de visão
MCL - Criada pela ICAM e utiliza o Fortran
JARS - Construído pelo Jet Propulsion Laboratory
AML - Desenvolvida pela IBM para seus robôs
HELP - Desenvolvida pela italiana DEA
LM - Desenvolvida pela IMG
Hoje existe uma variedade maior de linguagens de controle de robôs principalmente em nível visual, com destaque para o Lab View da National Intruments que consistem em uma linguagem visual (linguagem G) especialmente para automação e controle e aquisição de dados.
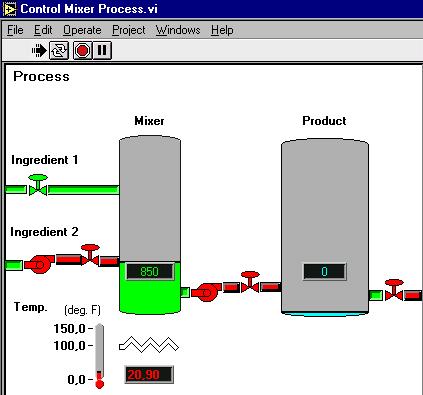
Exemplo de controle usando o Lab View da Natial Instrumentes
Sensores:
Sensores são dispositivos que captam sinais externos
para serem traduzidos e usados pelos robôs para tomar decisões.
Podem ser internos: indicando o estado interno do robô como velocidade,
aceleração ou posição ou externos. Dos externos
podemos citar entre outros os seguintes:
Sensores de distância: Para distâncias grandes usamos os sensores de ultra-som que é um transmissor e um receptor de ultrassom trabalhando em conjunto. A distância é dada em função do tempo decorrente da emissão do pulso de ultrassom e a recepção do mesmo. Para medir distâncias menores usamos sensores capacitivos ou indutivos.
Sensores de obstáculos: É feito usando um emissor e um receptor infravermelho lado a lado. Quando o robô se aproxima de algum objeto o receptor recebe os pulsos de infravermelho enviados pelo transmissor. O ajuste da distância a ser detectada pode ser feito atuando na sensibilidade do receptor.
Sensores de esforço: Trata-se de um grupo de sensores de contato para determinar a natureza e a direção das forças que aparecem no contato entre dois corpos.
Sensores táteis: Servem para determinar a forma de um objeto e também seu possível deslizamento pelo sensor, determinando a pressão de agarre.
Sensores de voz: São sensores mais sofisticados que reconhecem os comandos de voz emitidos pelo operador e transformam em um comando.
Sensores de visão: O sensor em si é
uma câmera geralmente em preto e branco que recebe um grande número
de sinais externos para um processamento e tomada de decisões. Num
sistema mais simples os sinais provenientes da câmera passam por
um filtro de modo a sobrar somente a informação do contorno
dos objetos para que o robô possa por exemplo desviar deles ou pegar
uma caneta com o braço mecânico.
Esses são apenas alguns aspectos importantes na
construção de um robô. Um estudo mais detalhado pode
ser feito com livros mais específicos. Meu objetivo é apenas
mostrar o começo de um assunto muito interessante e falado hoje
em dia.
Francisco Biasoto Neto
![]()
Web Author: Francisco Biasoto Neto
Copyright ©1999 by FBN - ALL RIGHTS RESERVED